RLCard Showdown
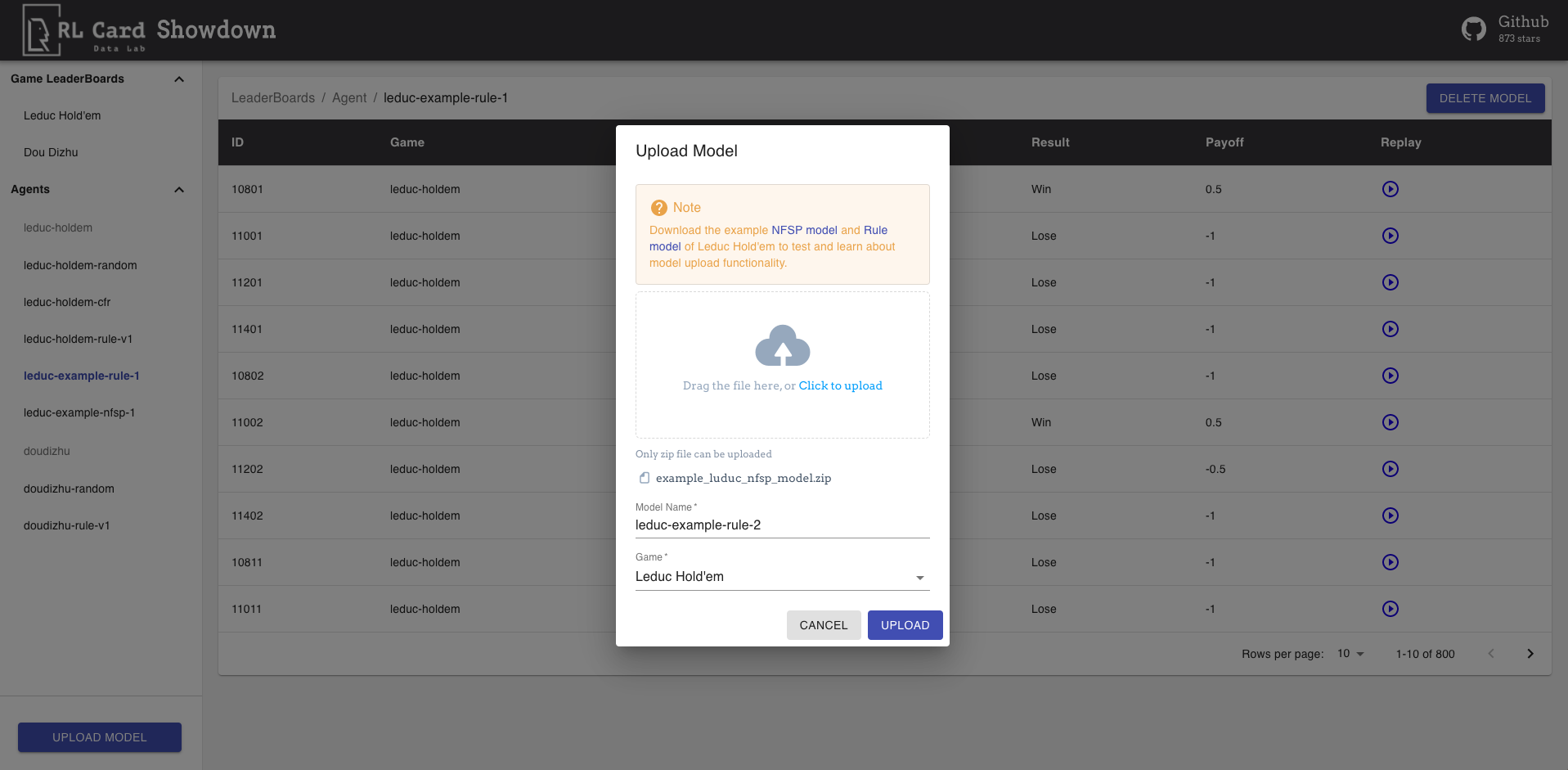
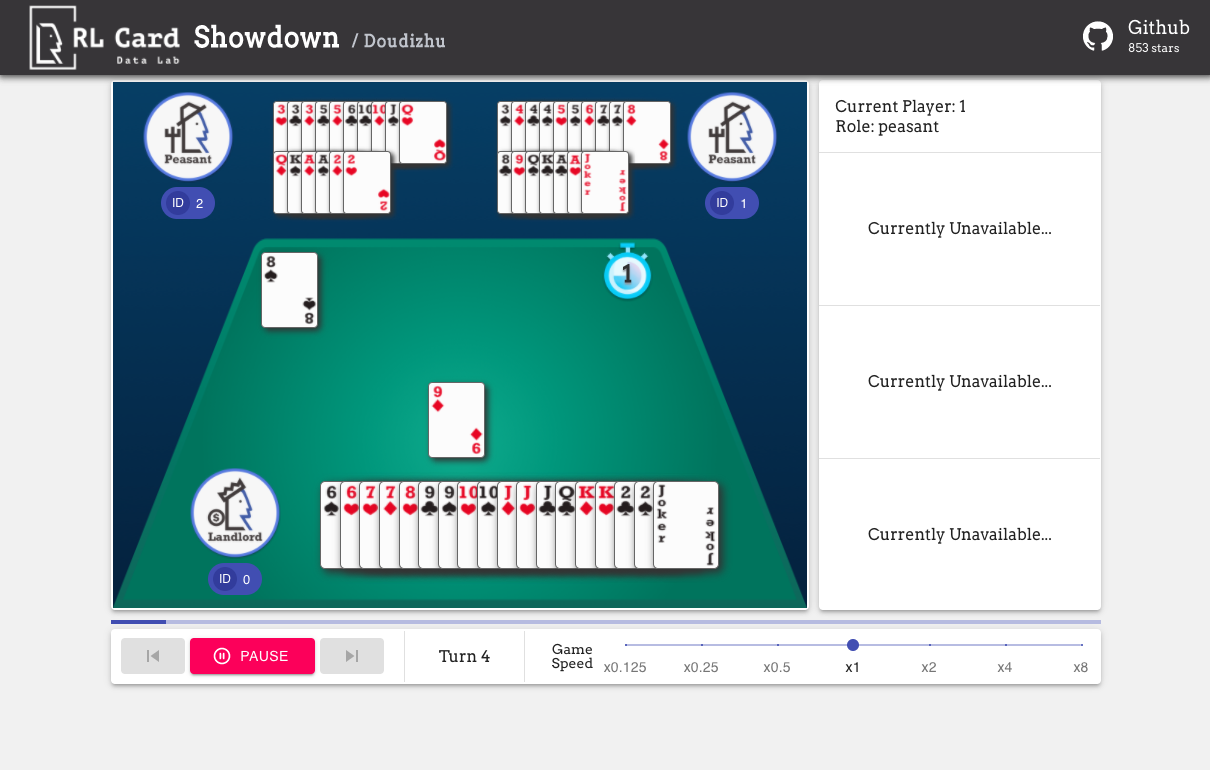
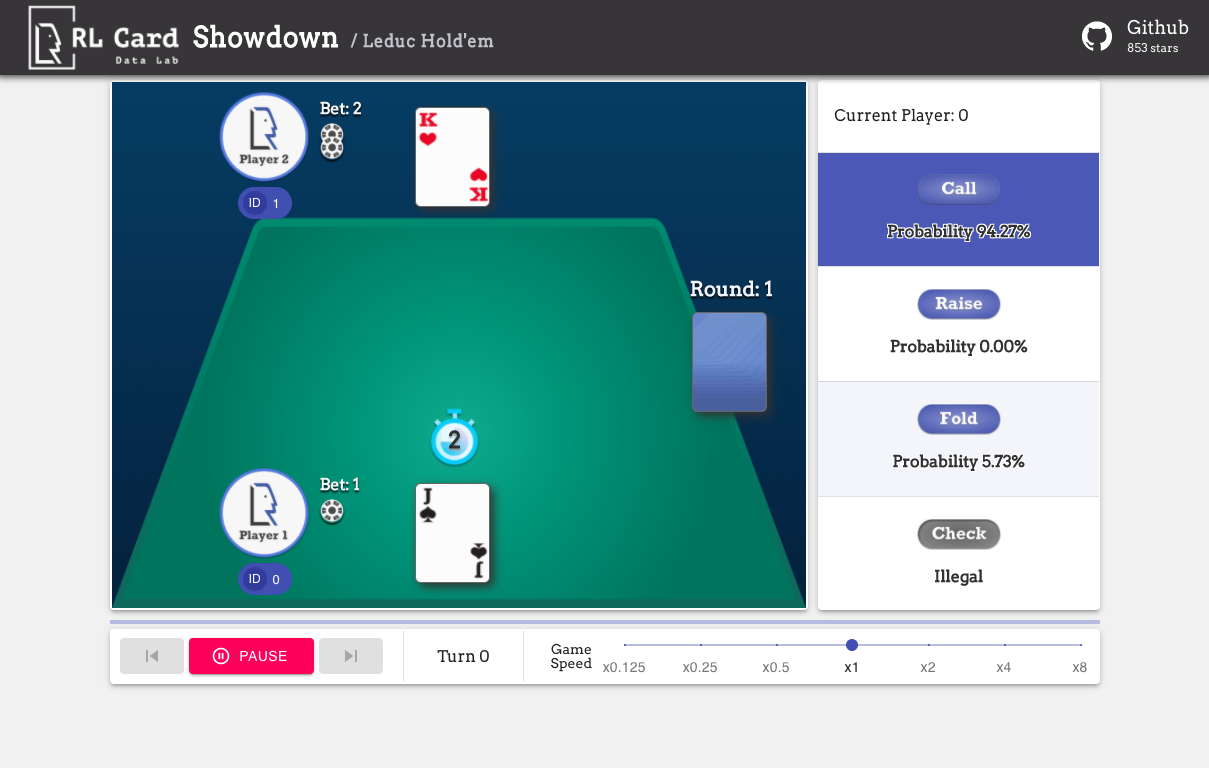
This is the GUI support for the RLCard project and DouZero project. RLCard-Showdown provides evaluation and visualization tools to help understand the performance of the agents. It includes a replay module, where you can analyze the replays, and a PvE module, where you can play with the AI interactively. Currently, we only support Leduc Hold'em and Dou Dizhu. The frontend is developed with React. The backend is based on Django and Flask. Have fun!
- Official Website: http://www.rlcard.org
- Tutorial in Jupyter Notebook: https://github.com/datamllab/rlcard-tutorial
- Paper: https://www.ijcai.org/Proceedings/2020/764
- Document: Click Here
- Online Demo with DouZero: https://www.douzero.org/
Cite this work
Zha, Daochen, et al. "RLCard: A Platform for Reinforcement Learning in Card Games." IJCAI. 2020.
@inproceedings{zha2020rlcard,
title={RLCard: A Platform for Reinforcement Learning in Card Games},
author={Zha, Daochen and Lai, Kwei-Herng and Huang, Songyi and Cao, Yuanpu and Reddy, Keerthana and Vargas, Juan and Nguyen, Alex and Wei, Ruzhe and Guo, Junyu and Hu, Xia},
booktitle={IJCAI},
year={2020}
}
Installation
RLCard-Showdown has separated frontend and backend. The frontend is built with React and the backend is based on Django and Flask.
Prerequisite
To set up the frontend, you should make sure you have Node.js and NPM installed. Normally you just need to manually install Node.js, and the NPM package would be automatically installed together with Node.js for you. Please refer to its official website for installation of Node.js.
You can run the following commands to verify the installation
node -v
npm -v
For backend, make sure that you have Python 3.6+ and pip installed.
Install Frontend and Backend
The frontend can be installed with the help of NPM:
git clone -b master --single-branch --depth=1 https://github.com/datamllab/rlcard-showdown.git
cd rlcard-showdown
npm install
The backend of leaderboard can be installed with
pip3 install -r requirements.txt
cd server
python3 manage.py migrate
cd ..
Run RLCard-Showdown
- Launch the backend of leaderboard with
cd server
python3 manage.py runserver
- Download the pre-trained models in Google Drive or 百度网盘 提取码: qh6s. Extract it in
pve_server/pretrained.
In a new terminal, start the PvE server (i.e., human vs AI) of DouZero with
cd pve_server
python3 run_douzero.py
Alternatively, you can start the PvE server interfaced with RLCard:
cd pve_server
python3 run_dmc.py
They are conceptually the same with minor differences in state representation and training time of the pre-trained models (DouZero is fully trained with more than a month, while DMC in RLCard is only trained for hours).
- Run the following command in another new terminal under the project folder to start frontend:
npm start
You can view leaderboard at http://127.0.0.1:3000/ and PvE demo of Dou Dizhu at http://127.0.0.1:3000/pve/doudizhu-demo. The backend of leaderboard will run in http://127.0.0.1:8000/. The PvE backend will run in http://127.0.0.1:5000/.
Demos

Contact Us
If you have any questions or feedback, feel free to drop an email to Songyi Huang for the frontend or Daochen Zha for backend.
Acknowledgements
We would like to thank JJ World Network Technology Co., LTD for the generous support, Chieh-An Tsai for user interface design, and Lei Pan for the help in visualizations.

 7 Jul 25, 2022
7 Jul 25, 2022
 17 Nov 18, 2022
17 Nov 18, 2022
 7.7k Dec 30, 2022
7.7k Dec 30, 2022
 18 Oct 31, 2022
18 Oct 31, 2022
 65 Dec 22, 2022
65 Dec 22, 2022
 49 Dec 21, 2022
49 Dec 21, 2022
 185 Dec 24, 2022
185 Dec 24, 2022
 46 Nov 17, 2022
46 Nov 17, 2022
 1 Jan 10, 2022
1 Jan 10, 2022
 15 Dec 17, 2022
15 Dec 17, 2022
 47 Jan 02, 2023
47 Jan 02, 2023
 3 Jan 03, 2023
3 Jan 03, 2023
 2 Jan 05, 2022
2 Jan 05, 2022
 462 Dec 05, 2022
462 Dec 05, 2022
 622 Dec 30, 2022
622 Dec 30, 2022
 2k Jan 09, 2023
2k Jan 09, 2023
 66 Dec 26, 2022
66 Dec 26, 2022
 8 Dec 03, 2022
8 Dec 03, 2022
 17 Dec 28, 2022
17 Dec 28, 2022
 69 Nov 24, 2022
69 Nov 24, 2022