Deep Implicit Templates for 3D Shape Representation
Zerong Zheng, Tao Yu, Qionghai Dai, Yebin Liu. arXiv 2020.
This repository is an implementation for Deep Implicit Templates. Full paper is available here.
Citing DIT
If you use DIT in your research, please cite the paper:
@misc{zheng2020dit,
title={Deep Implicit Templates for 3D Shape Representation},
author={Zheng, Zerong and Yu, Tao and Dai, Qionghai and Liu, Yebin},
year={2020},
eprint={2011.14565},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
Requirements
- Ubuntu 18.04
- Pytorch (tested on 1.7.0)
- plyfile
- matplotlib
- ninja
- pathos
- tensorboardX
- pyrender
Demo
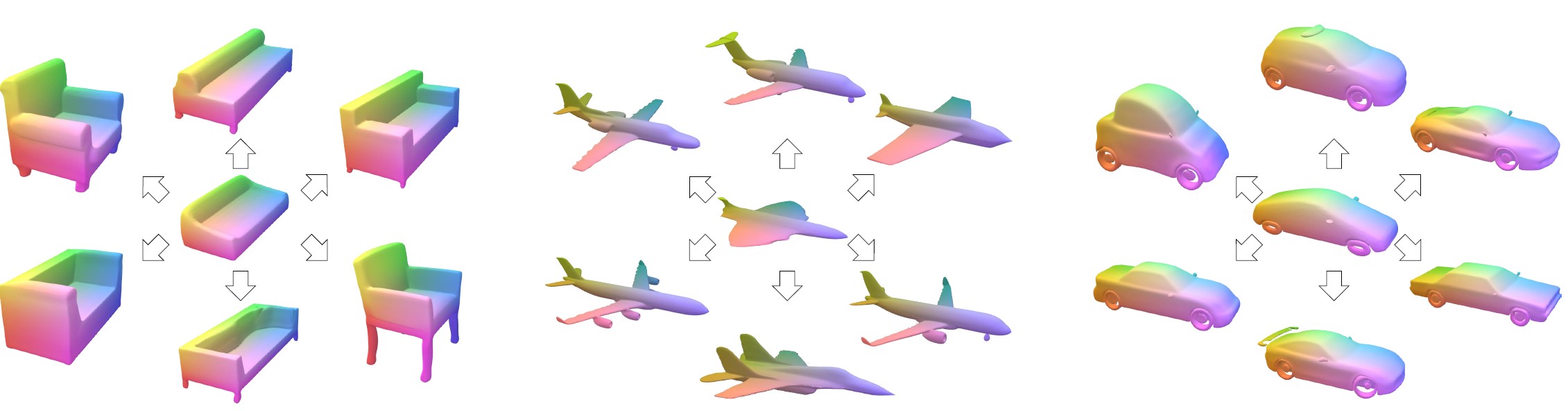
This repo contains pre-trained models for cars, chairs, airplanes and sofas. After cloning the code repo, please run the following commands to generate the sofa template as well as 20 training sofa meshes with the color-coded canonical coordinates (i.e., the correspondences between the template and the meshes).
GPU_ID=0
CUDA_VISIBLE_DEVICES=${GPU_ID} python generate_template_mesh.py -e pretrained/sofas_dit --debug
CUDA_VISIBLE_DEVICES=${GPU_ID} python generate_training_meshes.py -e pretrained/sofas_dit --debug --start_id 0 --end_id 20 --octree --keep_normalization
CUDA_VISIBLE_DEVICES=${GPU_ID} python generate_meshes_correspondence.py -e pretrained/sofas_dit --debug --start_id 0 --end_id 20
The canonical coordinates are stored as float RGB values in .ply files. You can render the color-coded meshes for visualization by running:
python render_correspondences.py -i pretrained/sofas_dit/TrainingMeshes/2000/ShapeNet/[....].ply
Data Preparation
Please follow original setting of DeepSDF to prepare the SDF data in ./data folder.
Traing and Evaluation
After preparing the data following DeepSDF, you can train the model as:
GPU_ID=0
preprocessed_data_dir=./data
CUDA_VISIBLE_DEVICES=${GPU_ID} python train_deep_implicit_templates.py -e examples/sofas_dit --debug --batch_split 2 -c latest -d ${preprocessed_data_dir}
To evaluate the reconstruction accuracy (Tab.2 in our paper), please run:
GPU_ID=0
preprocessed_data_dir=./data
CUDA_VISIBLE_DEVICES=${GPU_ID} python reconstruct_deep_implicit_templates.py -e examples/sofas_dit -c 2000 --split examples/splits/sv2_sofas_test.json -d ${preprocessed_data_dir} --skip --octree
CUDA_VISIBLE_DEVICES=${GPU_ID} python evaluate.py -e examples/sofas_dit -c 2000 -s examples/splits/sv2_sofas_test.json -d ${preprocessed_data_dir} --debug
Due the the randomness of the points sampled from the meshes, the numeric results will vary across multiple reruns of the same shape, and will likely differ from those produced in the paper.
More evaluation code is coming.
Acknowledgements
This code repo is heavily based on DeepSDF. We thank the authors for their great job!
License
DeepSDF is relased under the MIT License. See the [LICENSE file][5] for more details.

 7 Nov 22, 2022
7 Nov 22, 2022
 49 Dec 21, 2022
49 Dec 21, 2022
 44 Feb 24, 2022
44 Feb 24, 2022
 2 Jan 30, 2022
2 Jan 30, 2022
 31 Nov 01, 2022
31 Nov 01, 2022
 1 Jan 17, 2022
1 Jan 17, 2022
 49 Nov 25, 2022
49 Nov 25, 2022
 260 Dec 06, 2022
260 Dec 06, 2022
 34 Nov 09, 2022
34 Nov 09, 2022
 6 Aug 30, 2022
6 Aug 30, 2022
 74 Nov 29, 2022
74 Nov 29, 2022
 1 Feb 07, 2022
1 Feb 07, 2022
 58 Dec 15, 2022
58 Dec 15, 2022
 194 Dec 15, 2022
194 Dec 15, 2022
 3 Sep 30, 2022
3 Sep 30, 2022
 3 Jan 03, 2023
3 Jan 03, 2023
 26 Dec 10, 2022
26 Dec 10, 2022
 50 Oct 28, 2022
50 Oct 28, 2022
 32 Dec 23, 2022
32 Dec 23, 2022
 257 Jan 02, 2023
257 Jan 02, 2023