Implementing SYNTHESIZER: Rethinking Self-Attention in Transformer Models using Pytorch
Reference
Author: Yi Tay, Dara Bahri, Donald Metzler, Da-Cheng Juan, Zhe Zhao, Che Zheng
Google Research
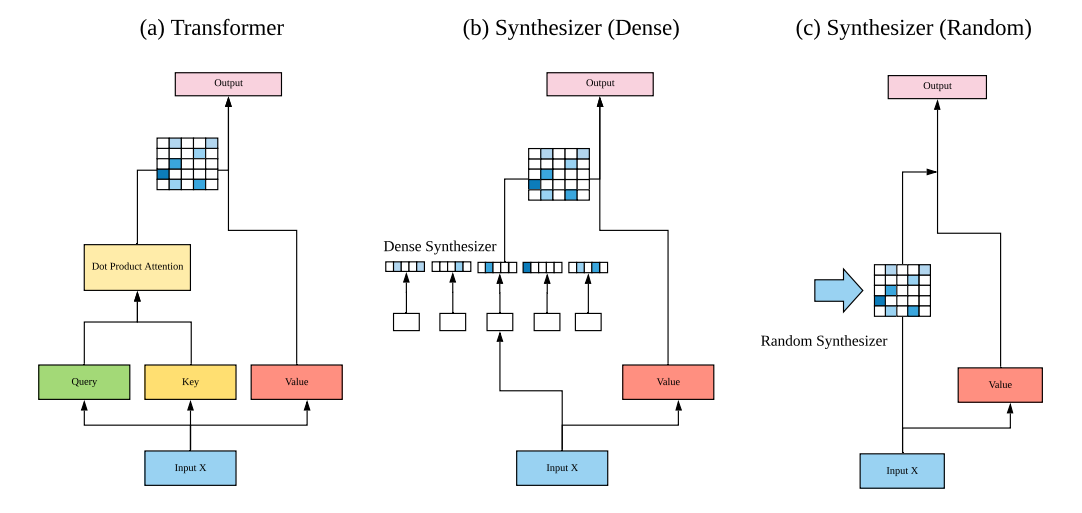
Method
1. Dense Synthesizer
2. Fixed Random Synthesizer
3. Random Synthesizer
4. Factorized Dense Synthesizer
5. Factorized Random Synthesizer
6. Mixture of Synthesizers
Usage
import torch
from synthesizer import Transformer , SynthesizerDense , SynthesizerRandom , FactorizedSynthesizerDense , FactorizedSynthesizerRandom , MixtureSynthesizers , get_n_params , calculate_flops
def main ():
batch_size , channel_dim , sentence_length = 2 , 1024 , 32
x = torch .randn ([batch_size , sentence_length , channel_dim ])
vanilla = Transformer (channel_dim )
out , attention_map = vanilla (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (vanilla ), calculate_flops (vanilla .children ())
print ('vanilla, n_params: {}, flops: {}' .format (n_params , flops ))
dense_synthesizer = SynthesizerDense (channel_dim , sentence_length )
out , attention_map = dense_synthesizer (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (dense_synthesizer ), calculate_flops (dense_synthesizer .children ())
print ('dense_synthesizer, n_params: {}, flops: {}' .format (n_params , flops ))
random_synthesizer = SynthesizerRandom (channel_dim , sentence_length )
out , attention_map = random_synthesizer (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (random_synthesizer ), calculate_flops (random_synthesizer .children ())
print ('random_synthesizer, n_params: {}, flops: {}' .format (n_params , flops ))
random_synthesizer_fix = SynthesizerRandom (channel_dim , sentence_length , fixed = True )
out , attention_map = random_synthesizer_fix (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (random_synthesizer_fix ), calculate_flops (random_synthesizer_fix .children ())
print ('random_synthesizer_fix, n_params: {}, flops: {}' .format (n_params , flops ))
factorized_synthesizer_random = FactorizedSynthesizerRandom (channel_dim )
out , attention_map = factorized_synthesizer_random (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (factorized_synthesizer_random ), calculate_flops (
factorized_synthesizer_random .children ())
print ('factorized_synthesizer_random, n_params: {}, flops: {}' .format (n_params , flops ))
factorized_synthesizer_dense = FactorizedSynthesizerDense (channel_dim , sentence_length )
out , attention_map = factorized_synthesizer_dense (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (factorized_synthesizer_dense ), calculate_flops (
factorized_synthesizer_dense .children ())
print ('factorized_synthesizer_dense, n_params: {}, flops: {}' .format (n_params , flops ))
mixture_synthesizer = MixtureSynthesizers (channel_dim , sentence_length )
out , attention_map = mixture_synthesizer (x )
print (out .size (), attention_map .size ())
n_params , flops = get_n_params (mixture_synthesizer ), calculate_flops (mixture_synthesizer .children ())
print ('mixture_synthesizer, n_params: {}, flops: {}' .format (n_params , flops ))
if __name__ == '__main__' :
main ()
Output
torch.Size([2, 32, 1024]) torch.Size([2, 32, 32])
vanilla, n_params: 3148800, flops: 3145729
torch.Size([2, 32, 1024]) torch.Size([2, 32, 32])
dense_synthesizer, n_params: 1083456, flops: 1082370
torch.Size([2, 32, 1024]) torch.Size([1, 32, 32])
random_synthesizer, n_params: 1050624, flops: 1048577
torch.Size([2, 32, 1024]) torch.Size([1, 32, 32])
random_synthesizer_fix, n_params: 1050624, flops: 1048577
torch.Size([2, 32, 1024]) torch.Size([2, 32, 32])
factorized_synthesizer_random, n_params: 1066000, flops: 1064961
torch.Size([2, 32, 1024]) torch.Size([2, 32, 32])
factorized_synthesizer_dense, n_params: 1061900, flops: 1060865
torch.Size([2, 32, 1024]) torch.Size([2, 32, 32])
mixture_synthesizer, n_params: 3149824, flops: 3145729
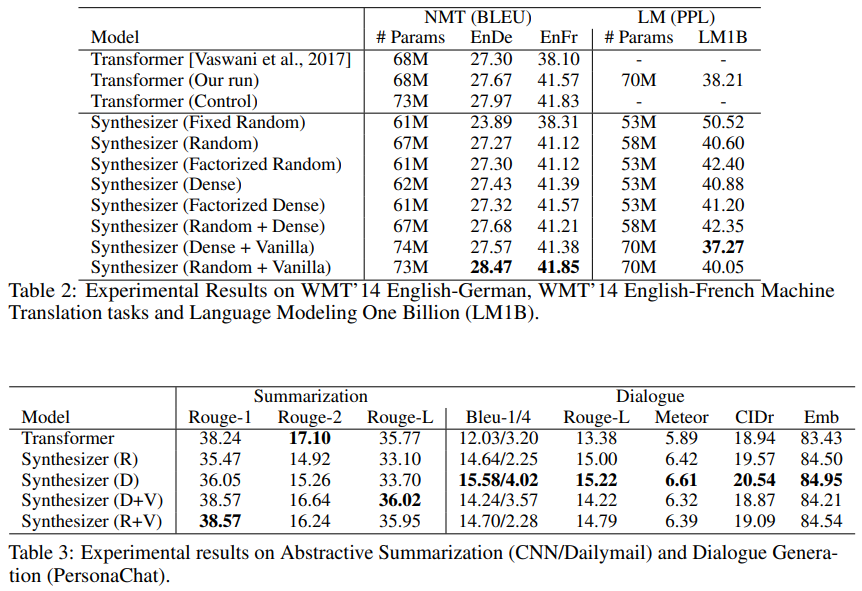
Paper Performance

 242 Dec 30, 2022
242 Dec 30, 2022
 7 Nov 01, 2022
7 Nov 01, 2022
 1 Jan 27, 2022
1 Jan 27, 2022
 0 Dec 04, 2021
0 Dec 04, 2021
 208 Dec 24, 2022
208 Dec 24, 2022
 6 Nov 19, 2022
6 Nov 19, 2022
 237 Nov 28, 2022
237 Nov 28, 2022
 588 Dec 31, 2022
588 Dec 31, 2022
 221 Dec 13, 2022
221 Dec 13, 2022
 364 Dec 28, 2022
364 Dec 28, 2022
 251 Dec 22, 2022
251 Dec 22, 2022
 1 Jan 09, 2022
1 Jan 09, 2022
 29 Dec 29, 2022
29 Dec 29, 2022
 2 Apr 28, 2022
2 Apr 28, 2022
 82 Jan 02, 2023
82 Jan 02, 2023
 71 Jan 04, 2023
71 Jan 04, 2023
 56 Nov 28, 2022
56 Nov 28, 2022
 26 Dec 11, 2022
26 Dec 11, 2022
 662 Jan 01, 2023
662 Jan 01, 2023
 5.6k Jan 06, 2023
5.6k Jan 06, 2023