HDRUNet [Paper Link]
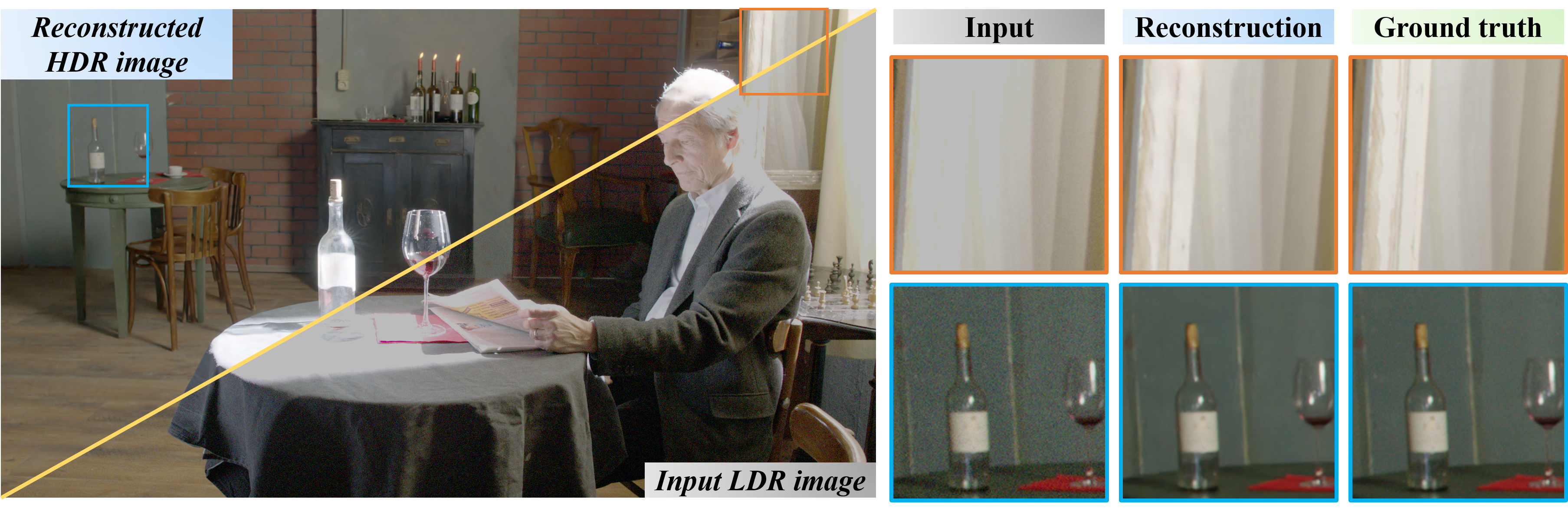
HDRUNet: Single Image HDR Reconstruction with Denoising and Dequantization
By Xiangyu Chen, Yihao Liu, Zhengwen Zhang, Yu Qiao and Chao Dong
We won the second place in NTIRE2021 HDR Challenge (Track1: Single Frame). The paper is accepted to CVPR2021 Workshop.
BibTeX
@inproceedings{chen2021hdrunet,
title={HDRUnet: Single image hdr reconstruction with denoising and dequantization},
author={Chen, Xiangyu and Liu, Yihao and Zhang, Zhengwen and Qiao, Yu and Dong, Chao},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={354--363},
year={2021}
}
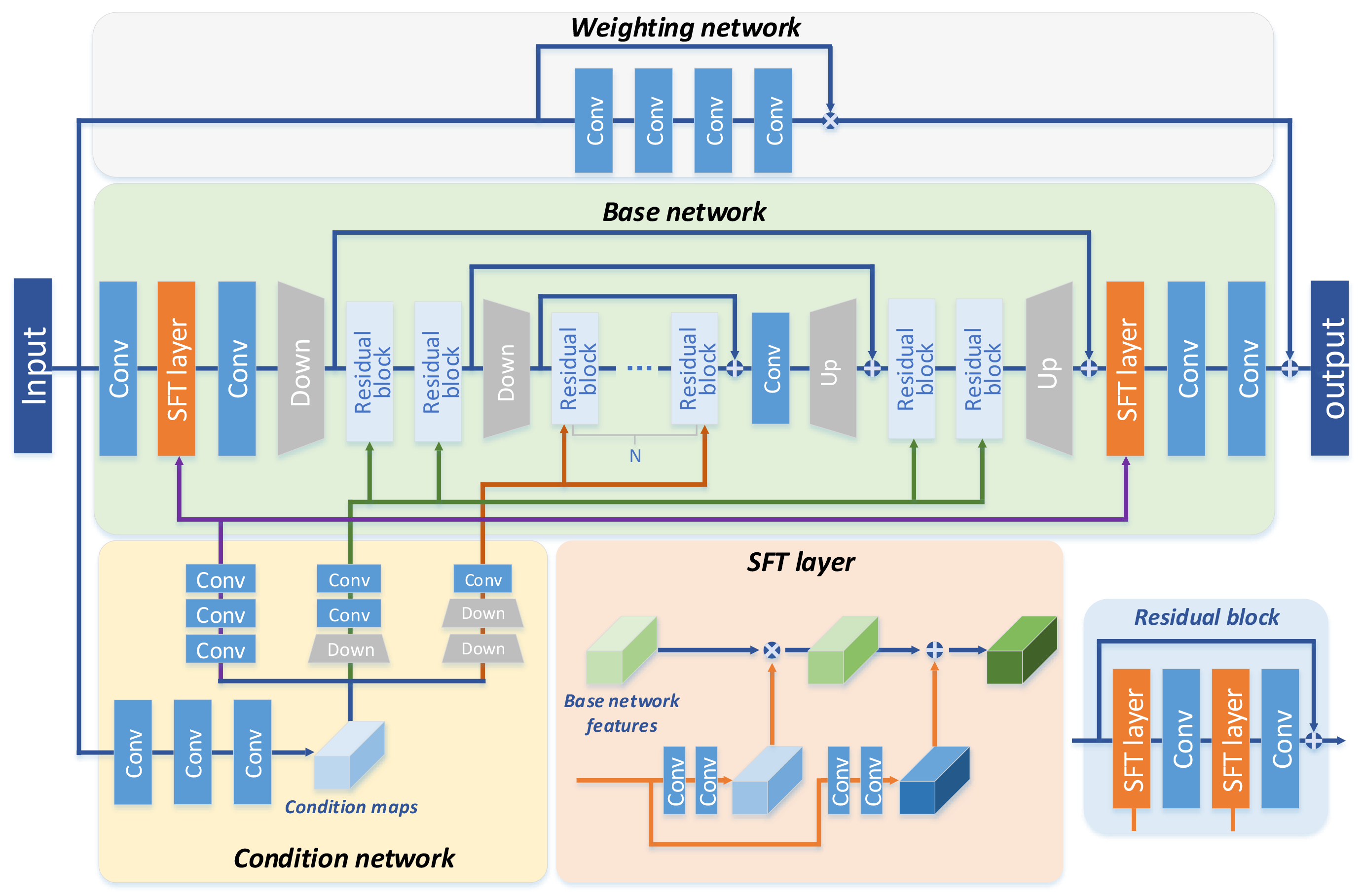
Overview
Overview of the network:
Overview of the loss function:
Tanh_L1(Y, H) = |Tanh(Y) - Tanh(H)|
Getting Started
Dataset
Register a codalab account and log in, then find the download link on this page:
https://competitions.codalab.org/competitions/28161#participate-get-data
It is strongly recommended to use the data provided by the competition organizer for training and testing, or you need at least a basic understanding of the competition data. Otherwise, you may not get the desired result.
Configuration
pip install -r requirements.txt
How to test
- Modify
dataroot_LQandpretrain_model_G(you can also use the pretrained model which is provided in the./pretrained_model) in./codes/options/test/test_HDRUNet.yml, then run
cd codes
python test.py -opt options/test/test_HDRUNet.yml
The test results will be saved to ./results/testset_name.
How to train
- Prepare the data. Modify
input_folderandsave_folderin./scripts/extract_subimgs_single.py, then run
cd scripts
python extract_subimgs_single.py
- Modify
dataroot_LQanddataroot_GTin./codes/options/train/train_HDRUNet.yml, then run
cd codes
python train.py -opt options/train/train_HDRUNet.yml
The models and training states will be saved to ./experiments/name.
Visualization
In ./scripts, several scripts are available. data_io.py and metrics.py are provided by the competition organizer for reading/writing data and evaluation. Based on these codes, I provide a script for visualization by using the tone-mapping provided in metrics.py. Modify paths of the data in ./scripts/tonemapped_visualization.py and run
cd scripts
python tonemapped_visualization.py
to visualize the images.
Acknowledgment
The code is inspired by BasicSR.

 33 Dec 14, 2022
33 Dec 14, 2022
 1.4k Dec 30, 2022
1.4k Dec 30, 2022
 6 Sep 12, 2022
6 Sep 12, 2022
 348 Jan 07, 2023
348 Jan 07, 2023
 85 Dec 14, 2022
85 Dec 14, 2022
 56 Nov 15, 2022
56 Nov 15, 2022
 5 Oct 16, 2022
5 Oct 16, 2022
 3 Dec 22, 2022
3 Dec 22, 2022
 519 Dec 21, 2022
519 Dec 21, 2022
 176 Dec 28, 2022
176 Dec 28, 2022
 10 Dec 12, 2022
10 Dec 12, 2022
 241 Dec 26, 2022
241 Dec 26, 2022
 3 Jul 07, 2022
3 Jul 07, 2022
 4 Apr 14, 2022
4 Apr 14, 2022
 31 Nov 22, 2022
31 Nov 22, 2022
 8 Sep 03, 2022
8 Sep 03, 2022
 29 Nov 08, 2022
29 Nov 08, 2022
 1.8k Dec 30, 2022
1.8k Dec 30, 2022
 111 Dec 11, 2022
111 Dec 11, 2022
 98 Sep 20, 2022
98 Sep 20, 2022